Чтобы настроить запрос необходимо выполнить следующие действия
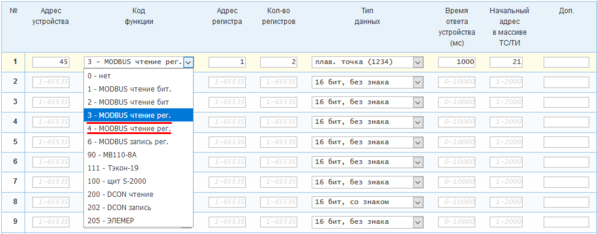
Задать параметру «Код функции» значение «3 – MODBUS чтение рег.» для функции Read Holding Registers, или «4 – MODBUS чтение рег.» для функции Read Input Registers.
Задать параметру «Тип данных» значение «плав. точка (1234)», «плав. точка (4321)» , «плав. точка (2143)» или «плав. точка (3412)» в зависимости от порядка байтов в регистрах опрашиваемого устройства .
Для каждого типа в скобках указан порядок следования байтов в регистрах опрашиваемого устройства.
Каждые 2 принятых подряд регистра будут декодированы как как число (значение ТИ) в кодировке IEEE Standard Binary Floating-Point.
Внимание: Так как один ТИ данного типа данных занимает 2 регистра (32 бита), количество считываемых регистров должно быть чётным.
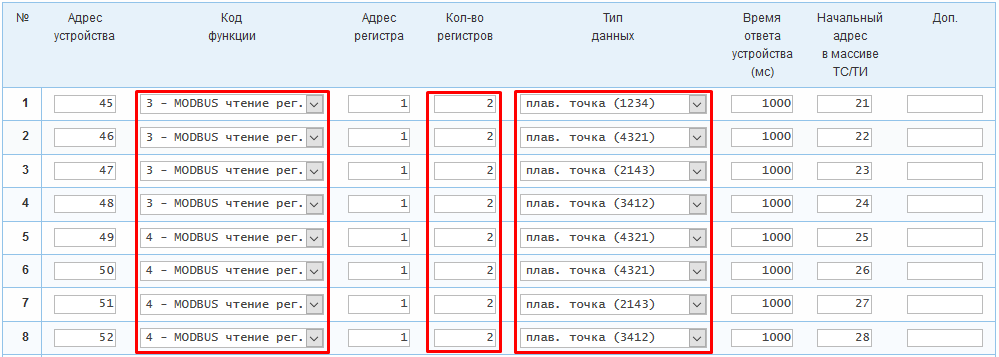
Пример: Запросы №1-4 будут выполняться по коду функции 3 к устройствам с адресами 45-48 соответственно. Запросы №5-8 будут выполняться по коду функции 4 к устройствам с адресами 49-52. Каждый запрос будет считывать 1 ТИ(число с плавающей точкой) из 2 регистров начиная с регистра с адресом 1. Время ответа для каждого запроса составит 1000 мс. ТИ запросов №1, №2, №3, №4, №5, №6, №7 и №8 будут записываться в массив ТИ начиная с адресов 21, 22, 23, 24, 25, 26, 27 и 28 соответственно.
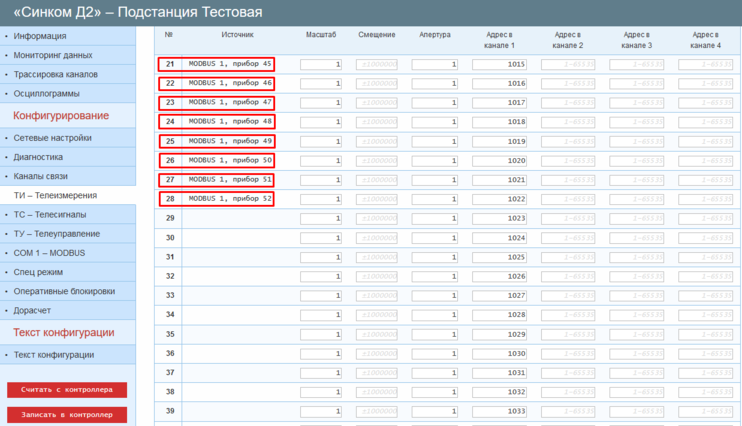
После настройки, ТИ каждого из запросов будут отражены во вкладке «ТИ – Телеизмерения» в соответствии с количеством считываемых регистров и значениями параметров «Начальный адрес в массиве ТС/ТИ».
Пример: В соответствии с примером выше,ТИ №21 – запрос №1, ТИ №22– запрос №2, ТИ №23 – запрос №3, ТИ №24– запрос №4, ТИ №25– запрос №5, ТИ №26 – запрос №6, ТИ №27 – запрос №7 и ТИ №28 – запрос №8.
Для сохранения внесённых изменений необходимо нажать кнопку «Записать в контроллер».